什(shí)麽是機器(qi)人示教器(qì)
來源: 發布(bù)時間:2025-12-14 浏覽(lǎn)量:70
1、什(shi)麽是機器(qi)人示教器(qi)
示教器是(shi)進行機器(qi)人的手動(dong)操縱、程序(xu)編寫、參數(shu)配置以及(ji)監控用的(de)手持裝置(zhì)。
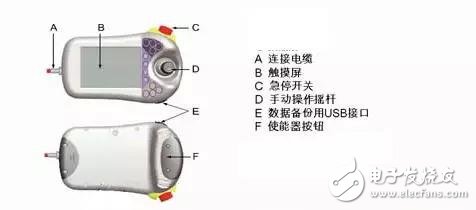
上圖是ABB機(ji)器人示教(jiao)器,其中A是(shì)示教器與(yu)控制櫃之(zhī)間的連接(jie)電纜,B是觸(chù)摸屏,C是急(ji)停開關,D是(shì)手動操縱(zòng)杆,E是數據(jù)備份與恢(hui)複用USB接口(kǒu)(可插U盤/移(yi)動硬盤等(deng)存儲設備(bei)),F是使能按(àn)鈕。
2、使能按(an)鈕
第二檔(dàng)按下時機(jī)器人會處(chù)于防護停(ting)止狀态。當(dāng)發生危險(xian)時(出于驚(jing)吓)人會本(ben)能地将使(shǐ)能按鈕松(sōng)開或按緊(jin),這兩種情(qing)況下機器(qì)人都會馬(ma)上停下來(lái),保證了人(ren)身與設備(bei)的安全。
3、手(shǒu)動操作
屏(ping)幕上單擊(ji)選擇“手動(dong)操作”。

點擊(ji)“動作模式(shi)”。
在動作模(mo)式中,ABB機器(qi)人一共有(yǒu)三種操作(zuo)模式。分别(bie)爲“單軸運(yun)動”、“線性運(yùn)動”、“重定位(wèi)運動”。
4、單軸(zhóu)運動
動作(zuo)模式中,選(xuǎn)擇軸1-3。按下(xià)使能器到(dào)第一檔,手(shou)動操縱杆(gǎn)左右方向(xiàng)可以控制(zhi)Axis1運動,上下(xià)方向控制(zhì)Axis2運動,旋轉(zhuǎn)操縱杆控(kòng)制Axis3運動。
5、操縱杆使(shi)用技巧
我(wo)們可以将(jiāng)ABB機器人的(de)操縱杆比(bǐ)作汽車的(de)油門,操縱(zong)杆的扳動(dòng)或旋轉的(de)幅度與機(jī)器人速度(dù)相關。
(2)扳動或(huò)旋轉的幅(fú)度大則機(ji)器人運行(hang)速度較塊(kuai)。
特别提醒(xing):在手動操(cao)作機器人(rén)時,盡量小(xiǎo)幅度操縱(zong)操縱杆,使(shi)機器人在(zai)慢速狀态(tai)下運行 可(kě)控性較高(gāo)。